ERASMO OBU is being tested in large-scale, real-world and dynamic environments
The ERASMO On-Board Unit will allow to determine the relative & absolute position of a #vehicle by leveraging on the perception #sensors available for #autonomousdriving and information stored in #navigation maps. One of the main problems faced by the industry is the lack of a cost effective & reliable #localization solution for #adas and/or #autonomousvehicles that fully considers the complexity of large-scale dynamic environment in which AVs are expected to operate in. The real-world driving conditions vary under highly variable weather, lighting and road surface conditions, which makes probabilistic determination key to determine the probability and suitability to drive under certain scenarios by using data collectors from multiple sensors. #algorithm models will be instrumental to determine the best course of action.
At this moment in time, the solutions on the market are too expensive to be implemented in mass market for the average buyer. An ideal solution will be able to cope with the need for confidence in the positioning solution and the ability to mitigate known #GNSS vulnerabilities such as jamming, spoofing or even the outage of the signal as a whole.
The ERASMO consortium has recently advanced on the definition of the Test Plan, cases and procedures for the hardware of the ERASMO Advanced Positioning Engine (EAPE). The EAPE architecture is distributed in different #hardware modules that end up connecting to the Erasmo OBU. The OBU is the very core of the EAPE that provides different services such as #5G #V2X communication and GNSS positioning to the other systems through different communication interfaces.
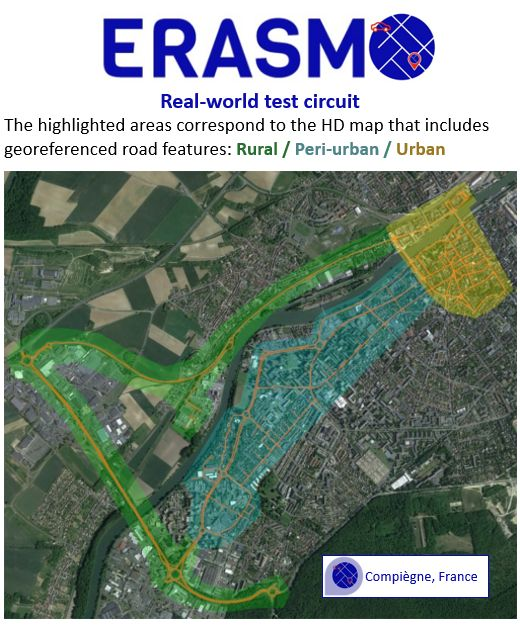
Besides validating that the technical aspects of the device are inherently safe, working as intended, meet the user requirements, and comply with the highest applicable standards, the testing of the ERASMO OBU is taking place in the city of Compiègne, France, under several clearly defined scenarios representing real-world driving scenarios. A driving route has been set out that partially defines the scenario (other criteria such as the weather are also a parameter of the of definition of a scenario). The different environments are decomposed into 3 areas: rural, peri-urban and urban (see image).
Distinct spatial zones are related to different scenarios, and one single recording of a journey may cover different scenarios e.g. the Erasmo OBU will be tested in the rural area that is defined as the nominal scenario but if the weather is degraded, subsequently a more challenging scenario is put to the test, evaluated, duly analysed. The test cases have been defined taking into account different operating environments considering the type of road environments (incl. road environment of GNSS measurements not available for a long period time), weather/light conditions, traffic conditions, GNSS satellites configuration and quality of visual features.